
Adam Romlein
Senior Research & Development Engineer
Kitware, Inc.
I am a senior research and development engineer at Kitware, Inc., building open-source computer vision systems for real-world deployment. I enjoy turning research prototypes into reliable software.
Portfolio

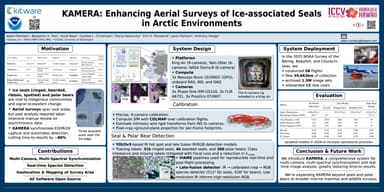
NOAA KAMERA
A multi-camera, multi-modal (EO/IR/UV) aerial imaging system for enhancing wildlife survey effectiveness, with real-time onboard perception.
Experience
Senior Research and Development Engineer — Kitware, Inc. (Hybrid)
Growing in my role at Kitware, I lead applied R&D efforts that bring computer vision models onto embedded platforms for dependable use in the field. I currently lead the KAMERA project, where the system supports real-time, deep-learning-based detection and geolocation of species like polar bears and seals from aerial platforms. My work also includes mentoring interns, collaborating across teams, and contributing to technical proposals and publications.
Research and Development Engineer — Kitware, Inc. (Hybrid)
I became the lead systems engineer on DARPA URSA, integrating deep learning algorithms onto Jetson Xavier platforms and managing a network of over 24 cameras across mobile and static setups. I also led integration for DARPA ANGLER, deploying image processing algorithms for a BlueROV2. This work spanned ROS/Python development, performance optimization, and iterative testing with over 20 weeks deployed in operational settings.
Research and Development Intern — Kitware, Inc. (Clifton Park, NY)
I joined two foundational projects: NOAA KAMERA, a multi-camera, multi-modal aerial survey system using EO, IR, and UV imagery to detect and geolocate Arctic marine mammals, and DARPA URSA (Urban Reconnaissance through Supervised Autonomy), focused on real-time edge-based tracking and activity recognition. I supported system integration across both, contributing to sensing networks backed by Jetson Xaviers and field-ready software workflows.
Research and Development Intern — Kitware, Inc. (Clifton Park, NY)
I built ROS1 Python nodes for a mobile multi-camera tracking system (DARPA SQUAD-X) and gained hands-on experience with robotics software onboard a Clearpath Husky.
Education
Clarkson University
B.S. in Computer Engineering, minor in Mathematics.
Conducted undergraduate research with Dr. Luke Rumbaugh, gaining hands-on experience across multiple 3D vision systems, including stereoscopic, time of flight, laser line scanner, structured light, and structure from motion.
News
Oct 2025
ICCV Marine Vision Workshop Paper
First-author paper accepted and presented at the ICCV Marine Vision Workshop.
June 2024
Flight Tests of KAMERA in Alaska
First real flight tests of the system in Alaska after numerous software and hardware upgrades.
Publications
IEEE Winter Conference on Applications of Computer Vision (WACV) 2019
Multi-Modal Detection Fusion on a Mobile UGV for Wide-Area, Long-Range Surveillance
M. Brown, K. Fieldhouse, E. Swears, P. Tunison, A. Romlein, and A. Hoogs